
姓名:刘姿甫
职称:讲师
导师类别:硕导
邮箱:zifuliu@hainanu.edu.cn
一、个人基本情况:
刘姿甫,男,1996年生,博士,英国上市公司365讲师、硕士研究生导师,海南省自由贸易港E类高层次人才,现为天然橡胶智能化生产团队骨干成员。毕业于日本筑波大学(导师:Prof. Tofael Ahamed),主要从事智能农业装备与农业机器人技术研究。发表SCI论文8篇,其中ESI高被引论文1篇,参编著作章节1篇;多次在日本农业信息学会(JSAI)、国际农业环境工程联合会议(JCEEA)、日本农业机械与食品工程师学会(JSAM)等国际学术会议上进行演讲和海报展示。
二、主要研究方向:
天然橡胶智能割胶装备;果园采摘机器人;农业视觉感知;机械臂智能控制。

一种低成本六自由度机械臂
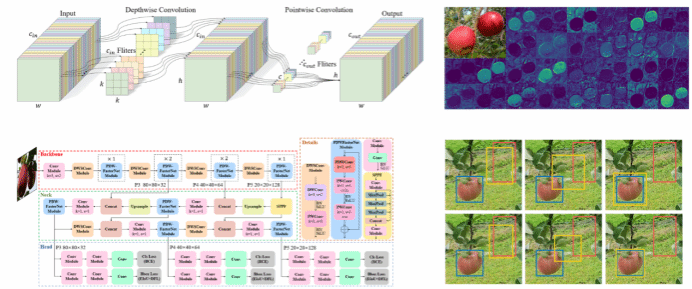
一种新型轻量级高效检测算法
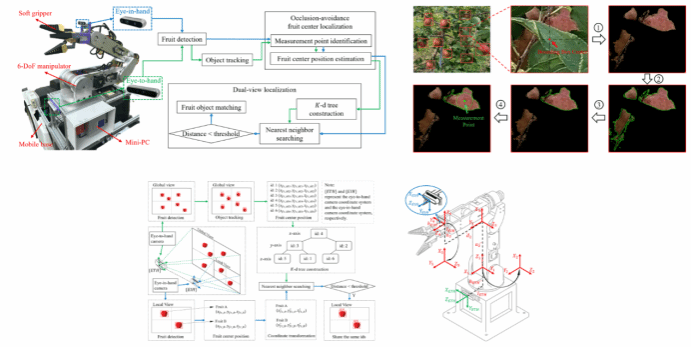
一种六自由度采摘机械臂的防遮挡及双视角水果定位的新方法
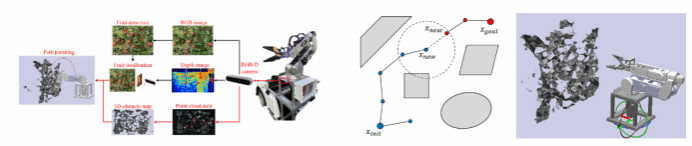
六自由度机械臂无碰撞路径规划方法研究
三、开设课程
《液压与气压传动》《液压与气压传动课程设计》
四、近年的代表性成果
主要荣誉及教学科研获奖情况:
海南自贸港E类高层次人才;
日本筑波大学研究群長表彰;
筑波大学学位代表;
部分代表性论文:
Liu Z, Abeyrathna R M R D, Sampurno R M, Nakaguchi, V M, Ahamed T. (2024). Faster-YOLO-AP: A lightweight apple detection algorithm based on improved YOLOv8 with a new efficient PDWConv in orchard. Computers and Electronics in Agriculture. 223, 109118. (SCI, 中科院一区Top, IF: 8.9, ESI Top 1%高被引论文)
Liu Z, Abeyrathna R M R D, Sampurno R M, Nakaguchi, V M, Ahamed T. (2025). A new occlusion-avoidance and dual-view fruit localization method with a 6-DoF Manipulator for orchard harvesting. Computers and Electronics in Agriculture. 237, 110634. (SCI, 中科院一区Top, IF: 8.9)
Liu Z, Sampurno R M, Abeyrathna R M R D, Nakaguchi, V M, Ahamed T. (2024). Development of a Collision-Free Path Planning Method for a 6-DoF Orchard Harvesting Manipulator Using RGB-D Camera and Bi-RRT Algorithm. Sensors, 24(24), 8113. (SCI, 中科院三区, IF: 3.5)
Sampurno R M, Liu Z, Nakaguchi V M, Jiang A, Ahamed T. (2026). Development of a new Single-Tree-Row-Tracking robot navigation for intra-row weeding operations in orchards using a Machine stereo vision system and LiDAR. Computers and Electronics in Agriculture. 244, 111491. (SCI, 中科院一区Top, IF: 8.9)
Nakaguchi, V M, Liu Z, Abeyrathna R M R D, Kuo Y, Genkawa T, Ahamed T. A thermal machine vision sensing system for quality assurance of quail eggs− freshness assessment and grading. Computers and Electronics in Agriculture. 240, 111189. (SCI, 中科院一区Top, IF: 8.9)
Sampurno R M, Liu Z, Abeyrathna R M R D, Ahamed T. (2024). Intrarow Uncut Weed Detection Using You-Only-Look-Once Instance Segmentation for Orchard Plantations. Sensors. 24(3), 893. (SCI, 中科院三区, IF: 3.5)
Nakaguchi, V M, Abeyrathna R M R D, Liu Z, Ahamed T. (2024). Development of a Machine Stereo Vision-based Autonomous Navigation System for Orchard Speed Sprayers. Computers and Electronics in Agriculture. 227, 109669. 2024. (SCI, 中科院一区Top, IF: 8.9)
Abeyrathna R M R D, Nakaguchi, V M, Liu Z, Sampurno R M, Ahamed T. (2024). 3D Camera and Single-Point Laser Sensor Integration for Apple Localization in Spindle-Type Orchard Systems. Sensors. 24(12), 3753. (SCI, 中科院三区, IF: 3.5)
参编著作章节:
Liu Z., Ahamed T. Smart Automation for End-Effectors in the Development of Horticultural Robots. In IoT and AI in Agriculture: Smart Automation Systems for increasing Agricultural Productivity to Achieve SDGs and Society 5.0, pp. 373-391. Singapore: Springer Nature Singapore. 2024.

 英国上市公司365公众号
英国上市公司365公众号 致远班
致远班